itke












The Institute of Building Structures and Structural Design (ITKE) at the University of Stuttgart focuses on the integration of structural design and architecture. Combining teaching and research in a highly interdisciplinary environment, ITKE’s goal is to push the boundaries of engineering and design towards novel and non-standard architectural applications.
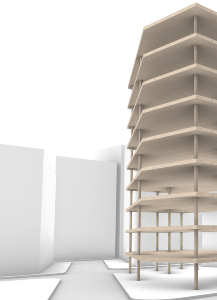
The research interests of the institute are geared towards material science for the production of high performance materials and their application, along with the study of innovative structural morphologies. Especially the focus on biomimetic and fibre composite materials has been of importance in ongoing research. These aspects are investigated both from a theoretical and a practical point of view, integrating computational engineering and advanced analysis methods together with fabrication and development of full scale prototypes.







Contact

Jan Knippers
Prof. Dr.-Ing.Institute Director