
Anastasia Malafey, Ekin S. Şahin, Anand N. Shah
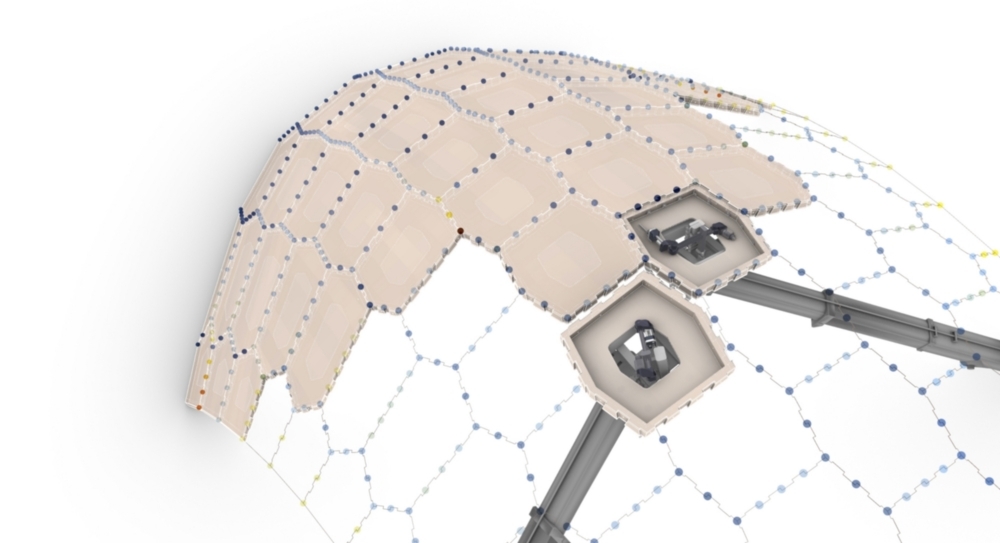
In dieser Forschungsarbeit wird ein neuartiges robotergestütztes Montagesystem für den Bauprozess von modularen Holzstrukturen vorgestellt. Neben den erheblichen ökologischen, gestalterischen und fertigungstechnischen Vorteilen dieser Konstruktionen sind vor allem segmentierte Holzschalen sehr materialeffizient und für große Spannweiten geeignet.
Der Bedarf an Traggerüsten und die hohe Anzahl von Verbindungen führen jedoch zu einer arbeitsintensiven Montage. Das vorgeschlagene System stellt die Wechselwirkung zwischen dem Entwurf, der Robotertechnik auf der Baustelle und der Koordinierung der Ausrüstung auf der Baustelle als statisch informierte Entwurfsmethode für die Montage neu vor. Diese Methodik bietet die Möglichkeit einer automatisierten Montage und einer Verringerung des Lehrgerüsts durch eine robotergestützte In-situ-Verbindungsstrategie, während sie gleichzeitig unerforschte Gestaltungsmöglichkeiten bietet, die über die Kapazität der Arbeiter vor Ort hinausgehen.
Folglich wird die Vorstellung von Gebäuden als effektiv montierte und demontierte Systeme neu überdacht. Das Konzept kann auch auf andere Struktursysteme als segmentierte Holzschalen, wie z. B. Platten, oder auf andere Materialsysteme ausgedehnt werden, bei denen das Thema der arbeitsintensiven Montage immer noch besteht.
ITECH M.Sc. Masterarbeit 2021: [Design für] Roboter-Montage von modularen Holzkonstruktionen
Anastasia Malafey, Ekin S. Şahin, Anand N. Shah
Betreuer: Simon Bechert (ITKE), Mathias Maierhofer (ICD)
Prüfer: Prof. Dr. Jan Knippers und Co-Prüfer: Prof. Achim Menges