{kind=link}




Reconfigurable Tensegrity Systems
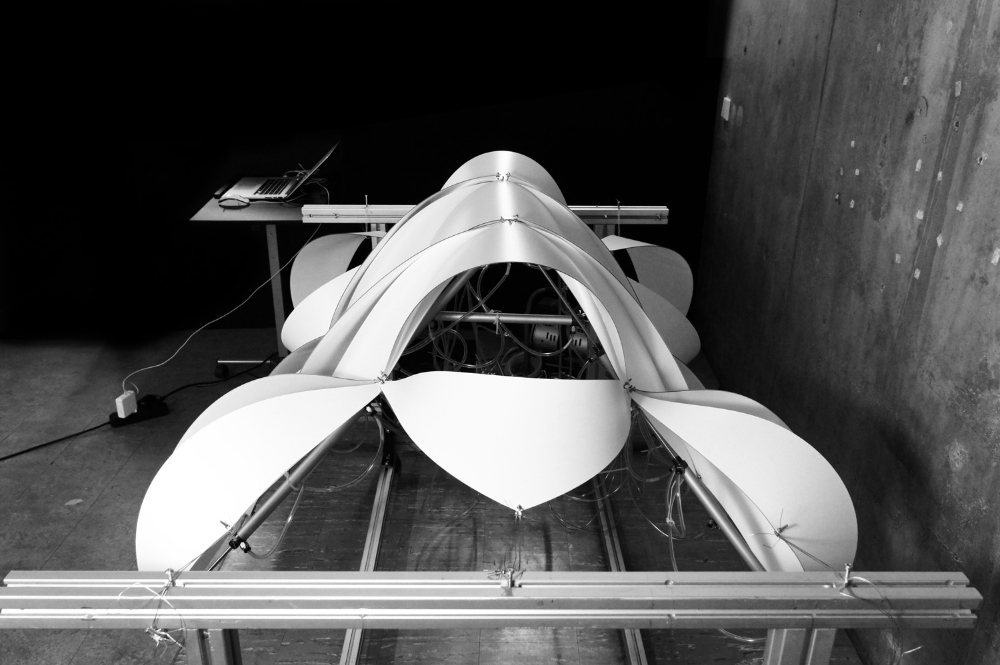
The project, Reconfigurable Tensegrity Systems, explored the possibilities of utilizing tensegrity principles to build a structural system that can reconfigure itself. The research begins with understanding the basic tensegrity rules, then exploring the methods of reconfiguring tensegrity structures, and finally the prototype construction.
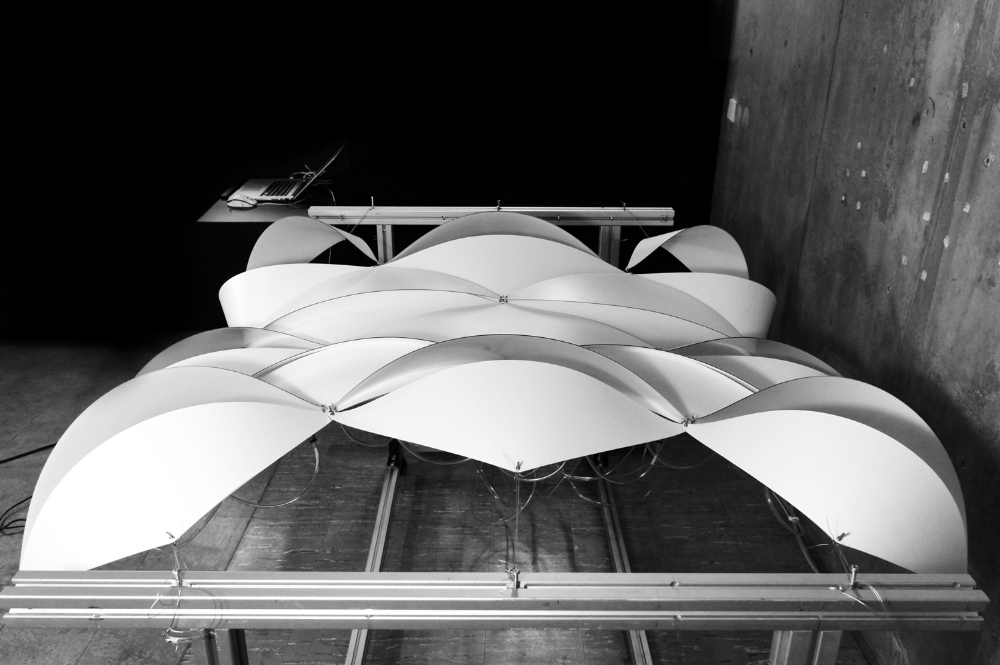
There are three primary objectives in this project – reconfigurability, responsiveness, and deployability. The structure can provide various architectural spaces and different illumination or ventilation conditions. In addition to that, the system is transportable and can either be installed on existing structures, i.e. as a canopy, or deployed as a self-supporting tent structure. This can be achieved with the same component layout but different anchoring methods.
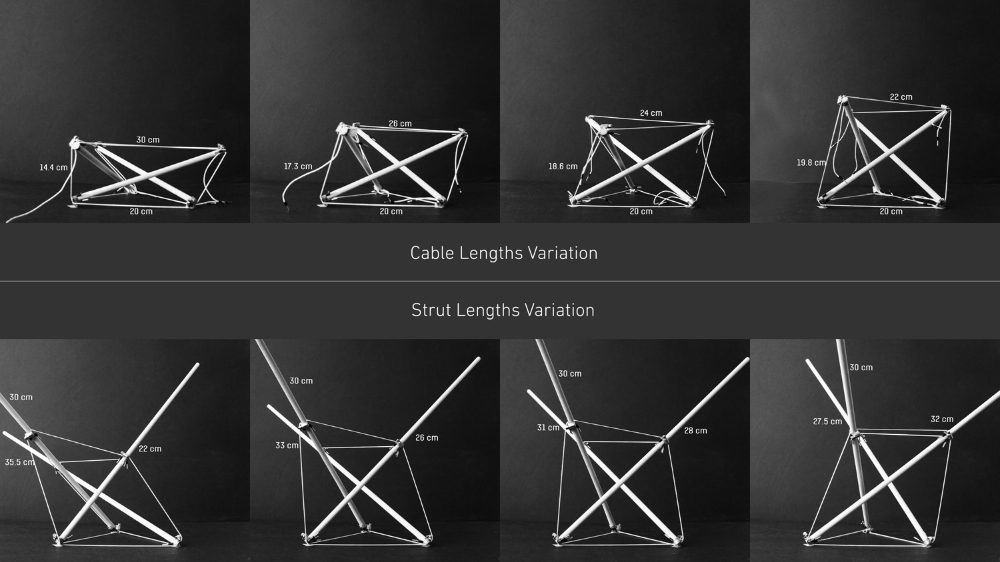
Tensegrity is a unique structural system which consists of continuous tension members and discontinuous compression members. Each member of the system takes either tension or compression load. Due to this particular structural behavior, the project developed a geometry based approach to approximate the equilibrium states of the system. The scope focused on parallel strut layout with 4 tensioning members connected to each end of the struts. The reconfiguration is done by adjusting the strut lengths. The approach of varying strut length is not only chosen because the number of struts is less than cables, but also changing the strut length has significantly more influence on the global geometry. Kangaroo 2 was used in the kinematic studies to understand how the system adapt the shape when one strut lengths varied.
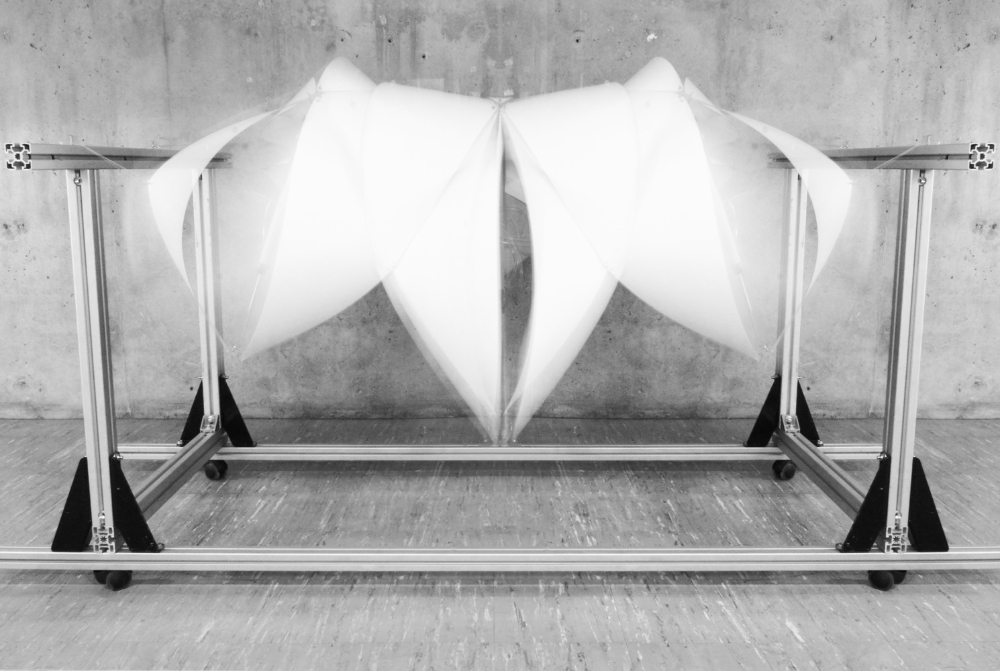
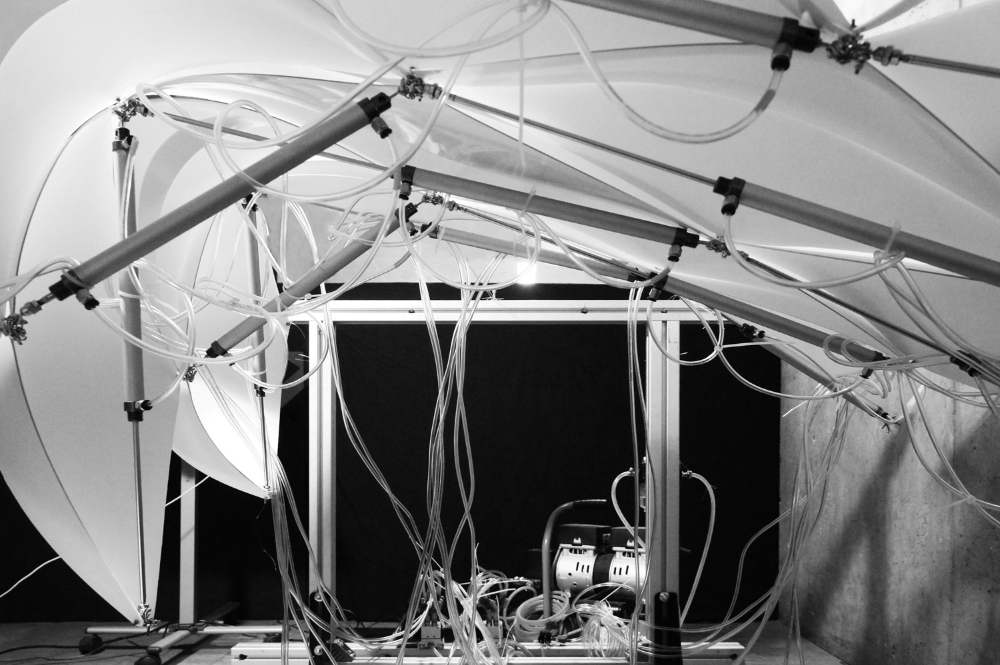
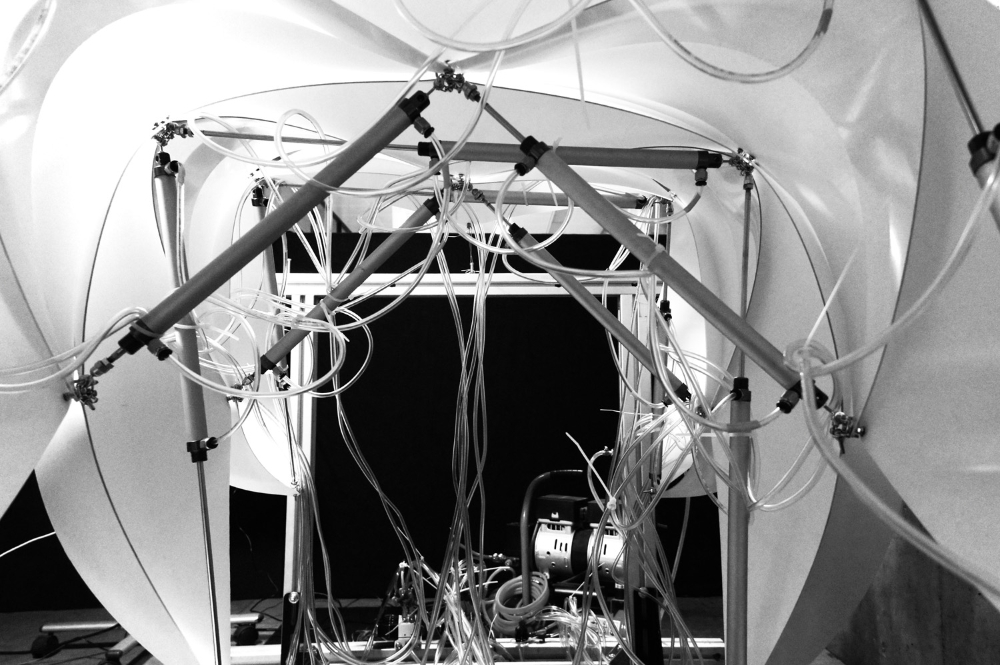
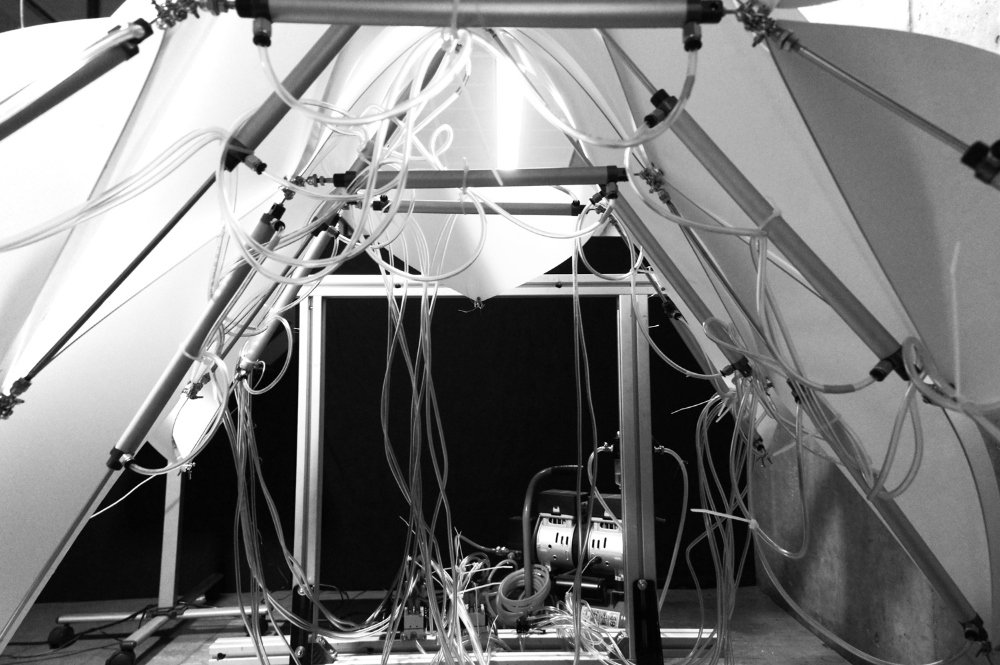
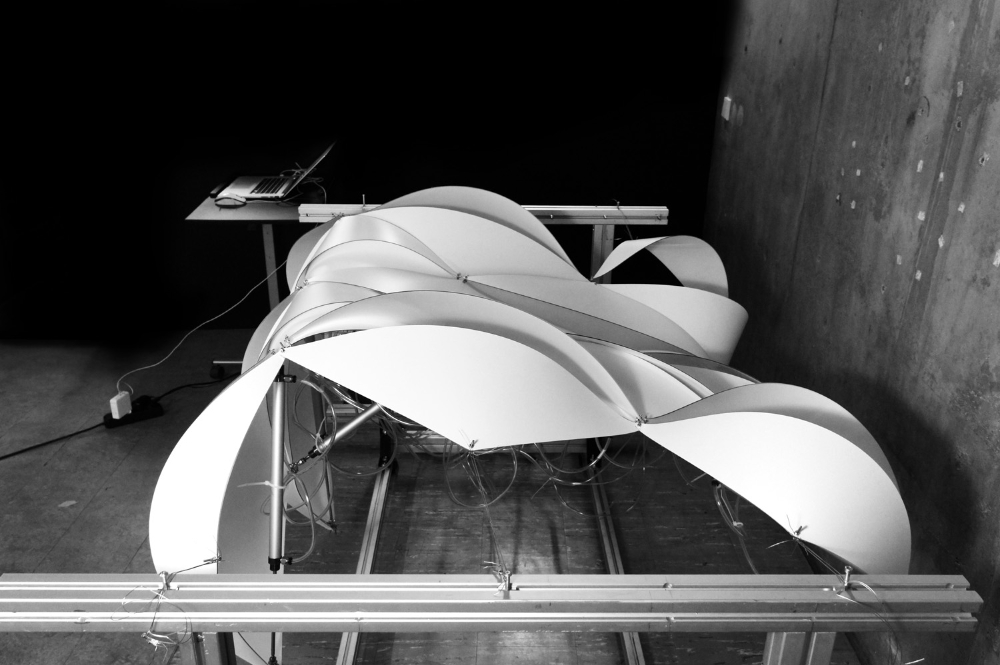
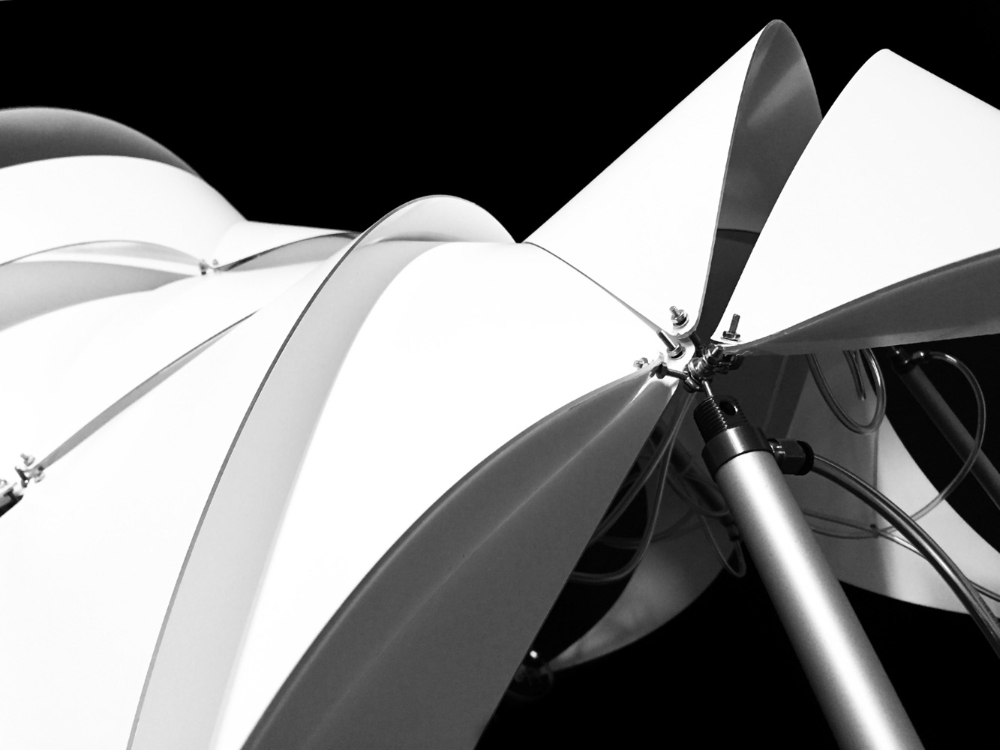
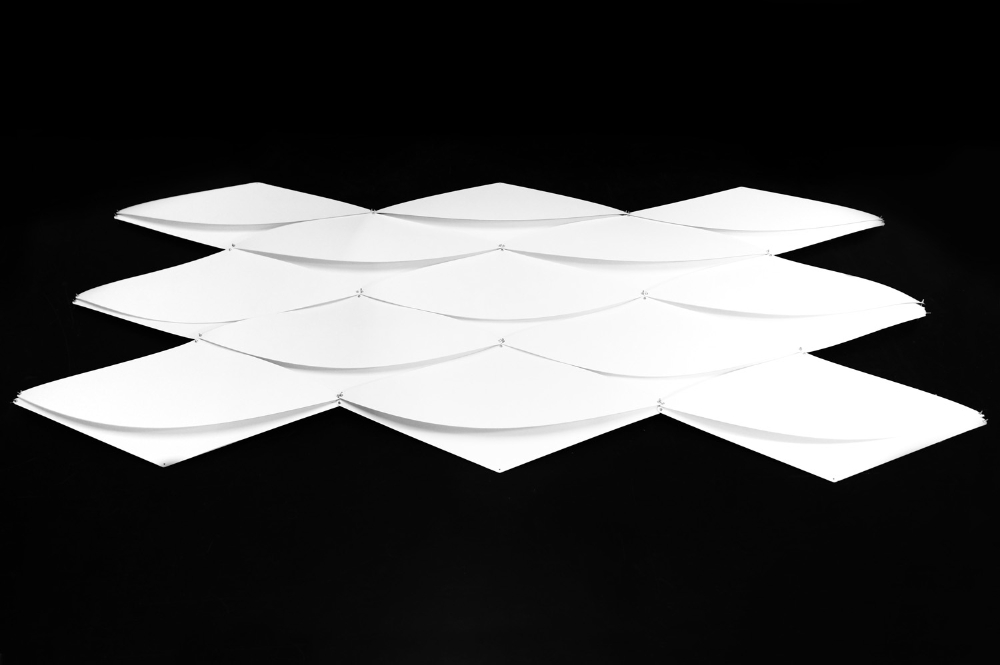
Based on the knowledge built from the geometric studies, a prototype with 13 units was designed and produced. The compression members are pneumatic actuators and the tension members are replaced by bendable polycarbonate panels. The main characteristic of this project is that the system only consists of two elements – actuators and panels. The first actuates the structure while taking compression loads, whereas the panels provide shading and acting as tensioning members. The system can be controlled and form desired configurations by utilizing the tensegrity principles.
Contact: Kuan-Ting Lai
Institute of Building Structures and Structural Design – Prof. Dr.‐Ing. Jan Knippers
Institute of Computational Design and Construction – Prof. Achim Menges
Supervisors
Anja Mader, Axel Körner